
Nachdem ich in meinem Gartenhaus bereits Temperatur, Luftfeuchtigkeit, Luftdruck, Feinstaub und einige andere Werte erfasse ( Weather Station with Dust Sensor based on ESP8266 ) , fehlen mir eigentlich nur noch Niederschlag und Windrichtung, sowie Windgeschwindigkeit.
Der Erfassung der Daten wird über einen ESP32 Mikrocontroller umgesetzt, der diese als JSON bereitstellt, damit ich sie mit HomeAssistant abgreifen und zur Verfügung stellen kann.
Im Gartenhaus sind bereits 12V DC, sowie 5V DC Leitungen verlegt, die Stromversorgung ist damit sichergestellt.
Windrichtung
Für die Erfassung der Windrichtung gibt es verschiedene Sensoren, ich habe mich für einen entschieden, der je nach Richtung verschiedene Spannungen ausgibt. Versorgt wird er mit 12V. Meiner gibt unterteilt in sieben Schritten die Spannungen 0V, 0.8V, 1.4V, 2.1V, 3V, 3,6V, 3,9V aus.
Wichtig zu erwähnen ist, dass man die Gradzahlen, also von-bis welche Spannung ausgegeben wird ausmessen sollte, da die Winkel für die Spannungen nicht gleichgroß sind, bei mir ist beispielsweise der Teil mit 3,9V zirka 90° groß, jedoch der Winkel für 0V nur 40° groß. Für die spätere Richtungsberechnung nehme ich die Mitte als Gradzahl zur Hand.
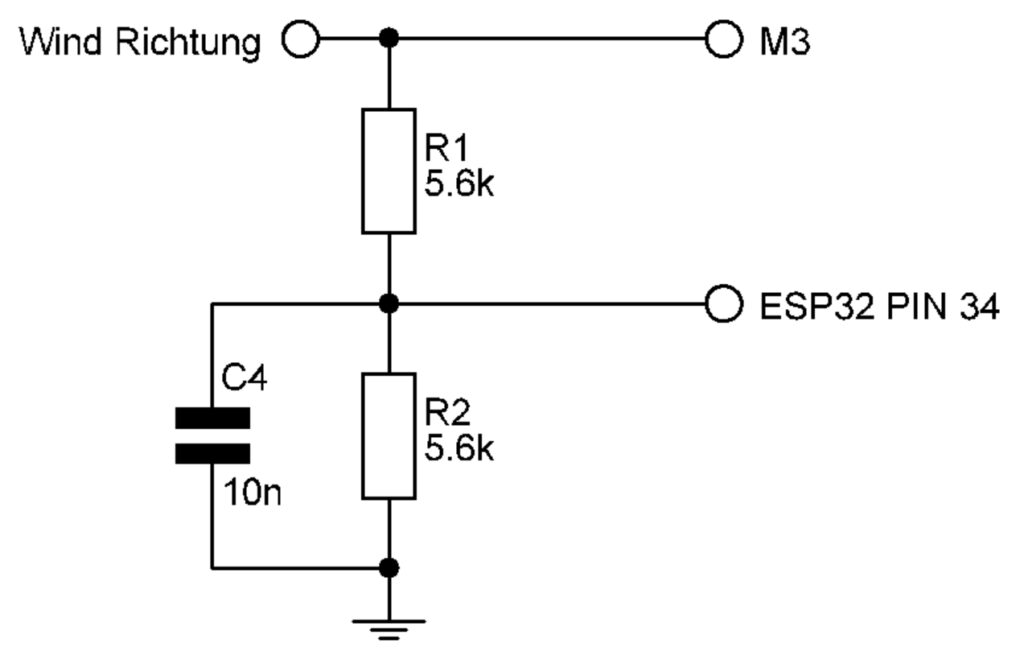
Da der ESP Spannungen über 3.3V nicht bevorzugt, habe ich mit einem 50/50 Spannungsteiler (2x 5.6kO) die Spannung halbiert, die am ESP32 ankommt.
Windgeschwindigkeit
Bei der Windgeschwindigkeitsmessung habe ich mich für ein Schalenanemometer entschieden. Es gibt sie in verschiedenen Ausführungen und verschiedenen Maxima bei der Messung der Windgeschwindigkeit. Das ist unter anderem auf verschiedene Messtechnologien zurückzuführen. Mein Anemometer kann maximal 70 m/s -> 252 km/h, die hoffentlich nie eintreten werden.
Mein Schalenanemometer wird mit 12V versorgt und generiert über ein NPN-Transistor Low-Hi Signale, die ich mit dem ESP32 auswerte. Bei meinem Anemometer war angegeben, dass eine Umdrehung 20 “Ticks” sind. Es müssen die “Ticks” pro Sekunde gemessen werden und mit dem Auflösungswert multipliziert werden. Meins hat eine Auflösung von 0.0875m/s pro “Tick” das bedeutet; erhalte ich zwei “Ticks” pro Sekunde, liegt eine Windgeschwindigkeit von 0.175 m/s vor.
Hardware
Zunächst stellt sich die Frage, wie die Montage aussehen soll. Windsensoren sollten relativ hoch und frei aufgestellt werden. Da ich am Gartenhaus bereits einen Mast habe, war dieser dafür prädestiniert. Also habe ich mir ein Rohr besorgt, dass sich horizontal zum vertikalen Mast an diesem montierten lässt. Im Rohr habe ich Kerben mit der Flex gemacht und dann 2mm stake Bleche angeschweißt. In der Mitte habe ich ein Loch für die Kabel gebohrt. Das Rohr mit den Stahlblechen habe ich mit Alu-Zink Spray als Rostschutz eingesprüht.
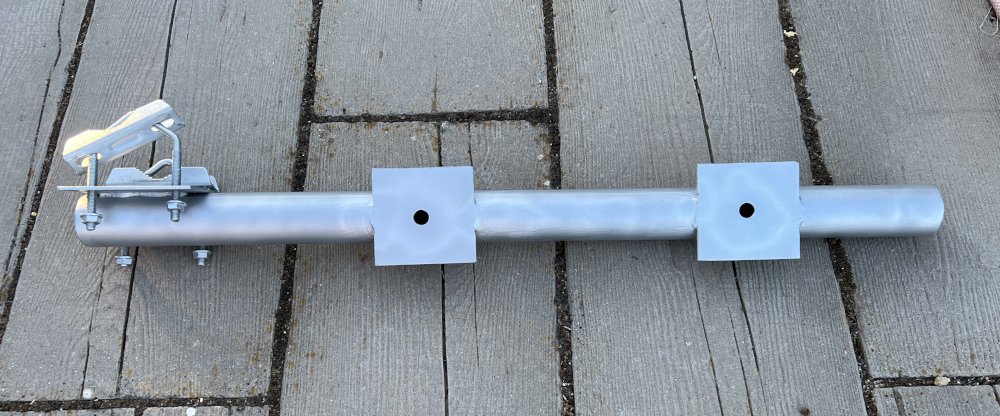
Danach habe ich die beiden Sensoren montiert. Als Unterlegscheiben habe ich Teflon Unterlegscheiben verwendet. Wichtig ist, dass der Richtungssensor so montiert ist, dass es bei der Montage am Mast leicht fällt diesen so aus zu richten, dass der Sensor die richtige Richtung detektiert. Da man direkt im Rohr keine Muttern befestigen kann, weil man dort sehr schlecht bis gar nicht hin kommen würde, habe ich Gewinde in das Stahlblech geschnitten, die die Schrauben halten.


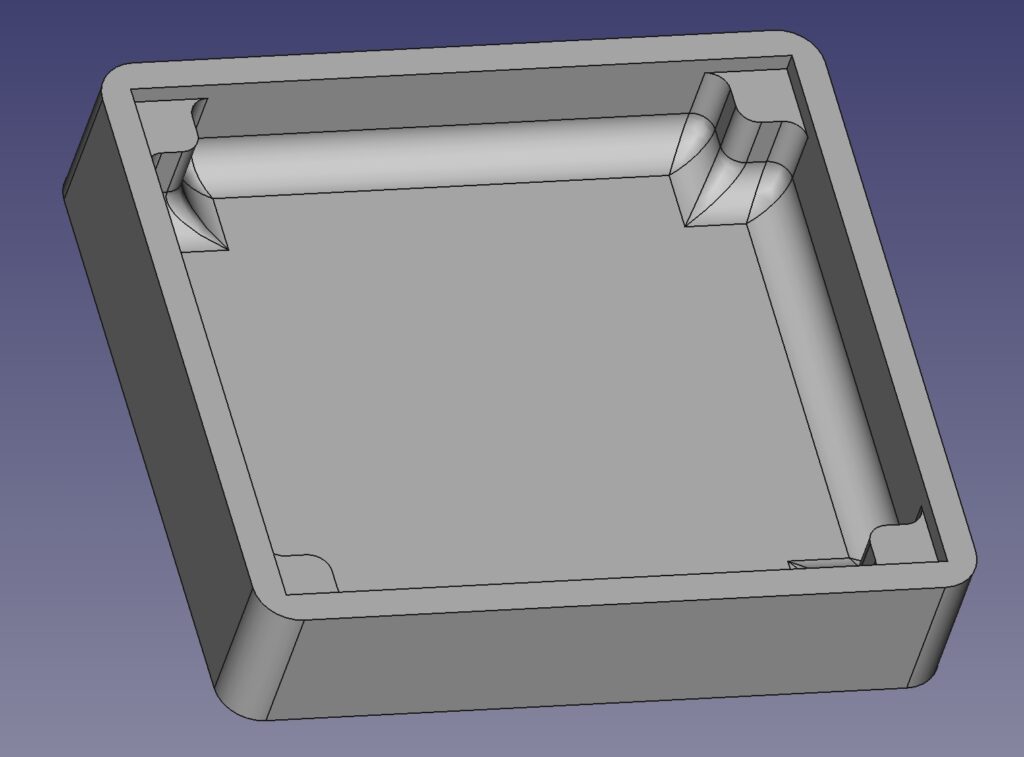
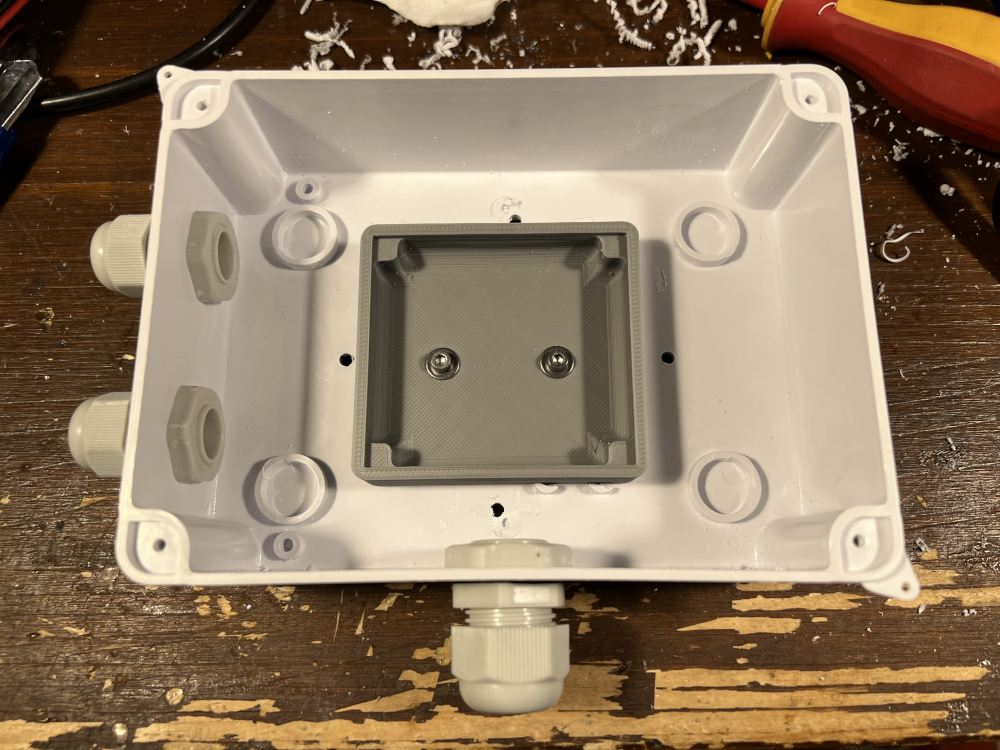
Nachdem die Sensoren montiert sind, muss die Technik verstaut werden. Als Mikrocontroller wird ein ESP32 mit eigens gestalteter Platine verwendet. (Den Link zur Platine, sowie dessen Bestückung werden später in diesem Artikel erläutert.) Dazu habe ich ein wasserdichtes Gehäuse mit Kabeldurchführungen erworben, sowie eine Masthalterung, an der das Gehäuse befestigt wird. Zunächst wird das Gehäuse mit Bohrungen, sowie Platinen-Halterung vorbereitet. Die Halterung ist 3D gedruckt und steht zum Download bereit.

Nachdem die Befestigungen und Boxen für die Technik soweit vorbereitet sind, können wir uns der Platine widmen.
Schaltplan
Die 12V DC vom Gartenhaus werden über einen DC-Wandler zu 5V umgewandelt und dann wird der ESP32 über VIN versorgt. Diese Schaltung klammere ich hier explizit aus.
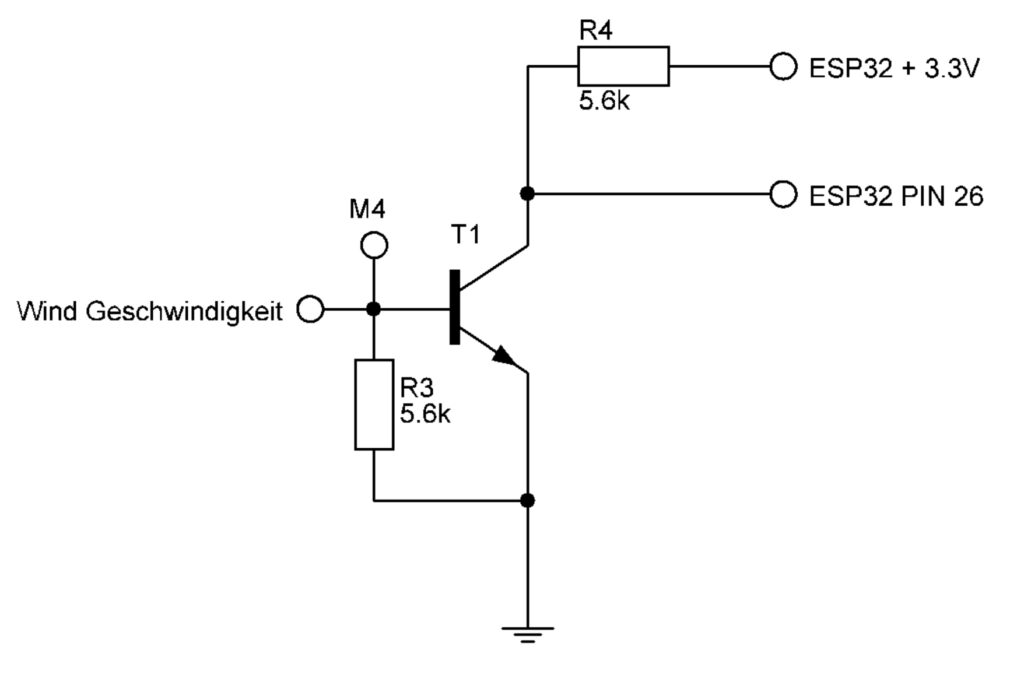
Der Windrichtungssensor liefert je nach Richtung zwischen 0-3.9V als Spannungen zurück. Über einen Spannungsteiler halbiere ich die Spannung und erfasse sie dann mit dem ESP32 als Analogsignal. Wichtig ist, dass man die ADC2 Kanäle nicht nutzen kann, wenn WLAN aktiviert ist, was der Fall ist. Deshalb müssen wir ADC1 PINs nutzen. Die M-Kontakte im Bild sind Messpunkte auf der Platine, die zur Diagnose mit dem Oszilloskop verwendet werden können.
Der Windgeschwindigkeitssensor liefert via NPN entsprechende Low-High Rechteck Signale. Da der ESP32 auf das Abfallen oder Ansteigen eines Digital-PINs via Interrupt reagieren kann, wir jedoch keine 12V am ESP32 verarbeiten können oder eben nur einmal mit einer Rauchfahne, wandle ich das 12V Low-High Signal mit einer einfachen Transistorschaltung in ein 3.3V Low-High Signal um.
Wie sich die Geschwindigkeit anhand der Low-High Signale berechnet habe ich bereits am Anfang des Artikels erläutert.
Platine
Hier die Platine dazu (Afillate): https://aisler.net/p/PDEJYOOO
- ESP32 mit 30 Pins
- EN-DC -> Brücke um den ESP über den DC-Wandler zu versorgen (im Normalbetrieb) oder eben über USB, wenn nicht gebrückt wurde, interessant für Debug-Zwecke
- DC-Wandler : RECOM R-78E50-05
- M1 : Eingangsspannung
- M2 : Ausgangsspannung DC-Wandler
- M3 : Windrichtungssensor Ausgang
- M4 : Windgeschwindigkeitssensor Ausgang
- M5 : Masse
- C1, C2, C3, C4 : 10nF
- L1 : 10µH
- R1, R2, R3, R4 : 5.6kO
- T1 : BC547C

Endmontage



Home Assistant
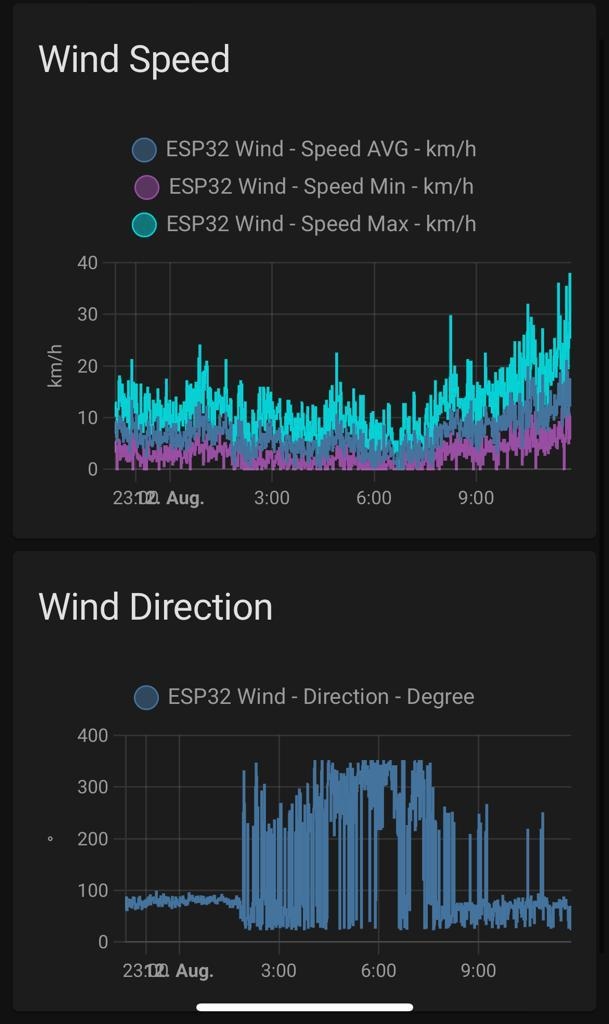
Der ESP32 ist so programmiert, dass er einmal pro Minute die Wind-Werte der vergangenen Minute zu einer Aussage zusammenfasst, dazu später. Diese Werte fragen wir alle 30 Sekunden im Home Assistant via REST ab, sowohl in m/s, wie auch in km/h. Der ESP32 liefert bei der Geschwindigkeit das Minimum, Maximum, sowie den Durchschnitt. Bei der Windrichtung ist die Berechnung etwas kompexer, hier wird ein berechneter Wert, sowie der Text, also beispielsweise O (für Ost), SW (für Südwest) etc. geliefert.
rest:
- scan_interval: 30
resource: http://<ESP32-IP>/jsondoaction
sensor:
- name: "ESP32 Wind - Speed AVG - m/s"
unit_of_measurement: "m/s"
value_template: "{{ value_json.windSpeedMinuteAvgMS | float | round(2) }}"
- name: "ESP32 Wind - Speed Min - m/s"
unit_of_measurement: "m/s"
value_template: "{{ value_json.windSpeedMinuteMinMS | float | round(2) }}"
- name: "ESP32 Wind - Speed Max - m/s"
unit_of_measurement: "m/s"
value_template: "{{ value_json.windSpeedMinuteMaxMS | float | round(2) }}"
- name: "ESP32 Wind - Speed AVG - km/h"
unit_of_measurement: "km/h"
value_template: "{{ value_json.windSpeedMinuteAvgKMH | float | round(2) }}"
- name: "ESP32 Wind - Speed Min - km/h"
unit_of_measurement: "km/h"
value_template: "{{ value_json.windSpeedMinuteMinKMH | float | round(2) }}"
- name: "ESP32 Wind - Speed Max - km/h"
unit_of_measurement: "km/h"
value_template: "{{ value_json.windSpeedMinuteMaxKMH | float | round(2) }}"
- name: "ESP32 Wind - Direction - Degree"
unit_of_measurement: "°"
value_template: "{{ value_json.windDirectionCalculatedDegree | int }}"
- name: "ESP32 Wind - Direction - Text"
value_template: "{{ value_json.windDirectionCalculatedText }}"
- name: "ESP32 Radiation - Free RAM"
unit_of_measurement: "bytes"
value_template: "{{ value_json.freeram | int }}"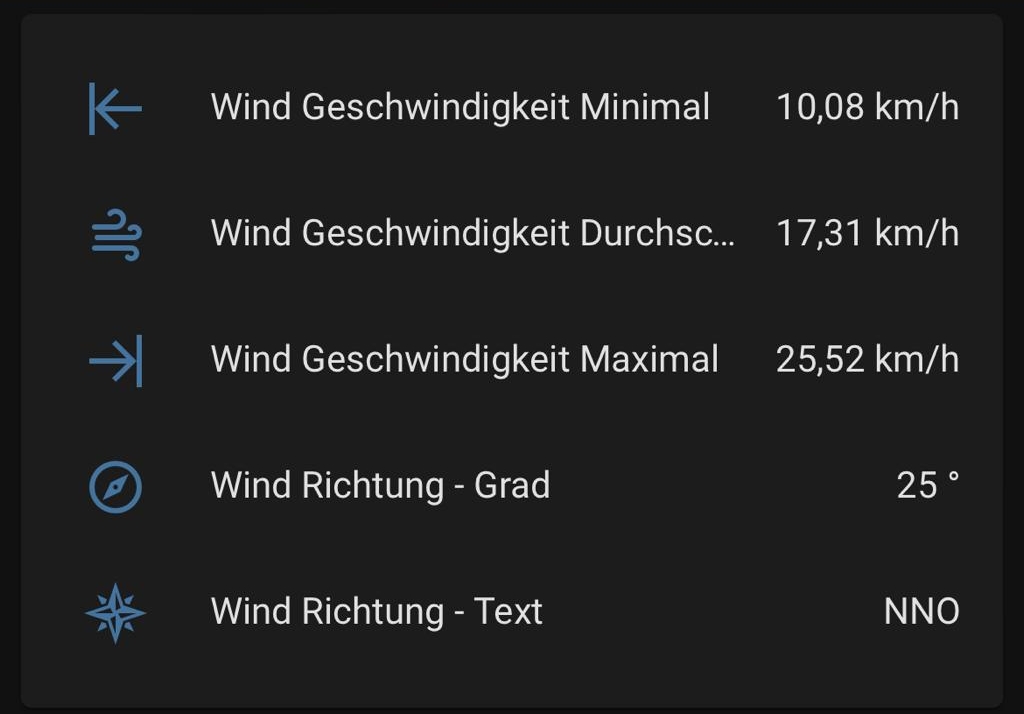
Software
Windgeschwindigkeit
Beginnen wir mit der Bestimmung der Windgeschwindigkeit; Hier müssen wie die Low-Hi Signale pro Sekunde zählen. Zunächst definieren wir eine statische Variable mit der Auflösung des Geschwindigkeitsmessers, sowie die entsprechenden Arrays:
static double speedResolution = 0.0875; // m/s per tick per second
int oneSecondWindTicks[60];
int oneSecondWindTicksLastMinute[60];
int minuteTicksSum;
double minuteWindSpeedAvgMS; // m/s
double minuteWindSpeedMinMS; // m/s
double minuteWindSpeedMaxMS; // m/sDafür registrieren wir ein Interrupt, dass in ein Array für die jeweilige Sekunde die “Ticks” hochzählt:
void IRAM_ATTR eventWindSpeedTick()
{
int actualSecond = timeClient.getSeconds();
if (actualSecond > -1 && actualSecond < 60)
{
oneSecondWindTicks[actualSecond]++;
}
}In der initPinModes() Funktion registrieren wir das Event auf das Fallen des PINs:
pinMode(windSpeedPin, INPUT);
attachInterrupt(digitalPinToInterrupt(windSpeedPin), eventWindSpeedTick, FALLING);In der changeMinute() Funktion, die über den Scheduler jede Sekunde aufgerufen wird und prüft, ob sich die Minute geändert hat, wird das oneSecondWindTicks in ein genau gleichgroßes Array für die vergangene Minute kopiert, um darauf Berechnungen durch zu führen. Danach wird das aktuelle Array “genullt”.
memcpy(oneSecondWindTicksLastMinute, oneSecondWindTicks, sizeof(oneSecondWindTicks));
for (int i=0; i<60; i++)
{
oneSecondWindTicks[i] = 0;
}Um dann in der buildLastMinuteVals() Funktion Minimum, Maximum und Durchschnitt zu ermitteln. Dort wird auch die “Auflösung” des Windgeschwindigkeitssensor relevant, denn diese sagt aus welche Windgeschwindigkeit pro Tick gilt. Die Umrechnung der m/s in km/h wird beim Abruf des JSON getätigt.
// wind speed
int minTickVal = oneSecondWindTicksLastMinute[0];
int maxTickVal = 0;
minuteTicksSum = 0;
for (int i=0; i<60; i++)
{
int workVal = oneSecondWindTicksLastMinute[i];
if (workVal < 1000)
{
if (workVal < minTickVal) // set min
{
minTickVal = workVal;
}
if (workVal > maxTickVal) // set max
{
maxTickVal = workVal;
}
minuteTicksSum += workVal; // add to sum
}
}
double avgTickVal = (double)minuteTicksSum / (double)60;
// convert to m/s
minuteWindSpeedAvgMS = avgTickVal * speedResolution;
minuteWindSpeedMinMS = (double)minTickVal * speedResolution;
minuteWindSpeedMaxMS = (double)maxTickVal * speedResolution;Die Berechnung der Windgeschwindigkeit ist relativ einfach, komplizierter wird es bei der Berechnung der Windrichtung.
Windrichtung
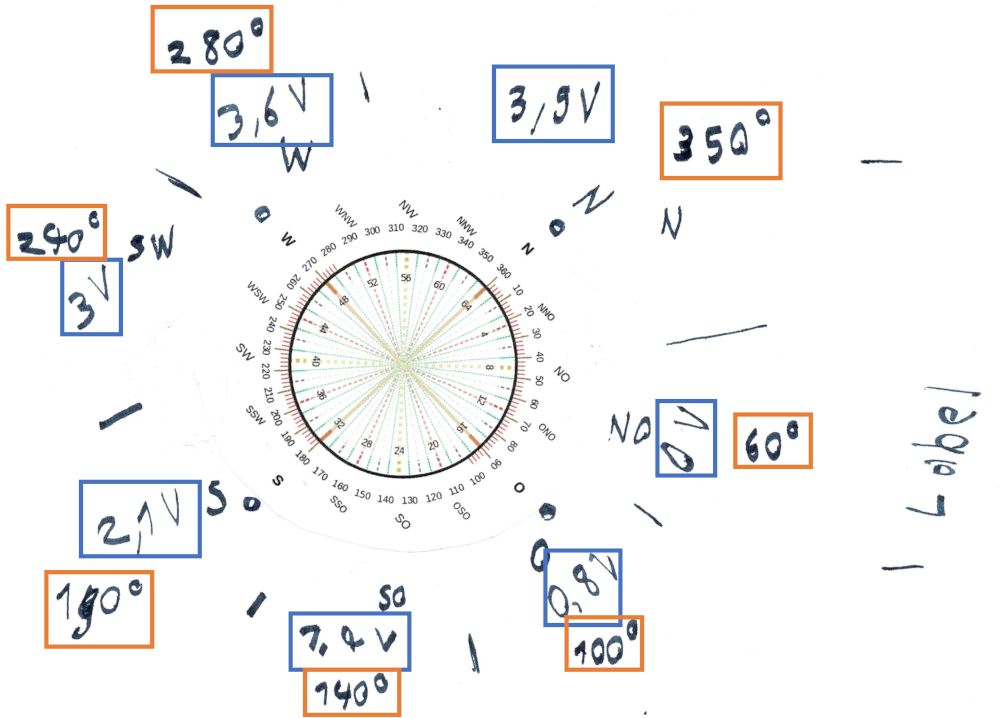
Um auf die Aussage vom Anfang des Artikels zurück zu kommen, hat nicht jeder Teil des Richtungssensors die gleiche Größe (in Grad). Zunächst habe ich den Richtungssensor auf ein Blatt Papier gestellt, markiert wo die Schrauben und das Label sind, dann den Sensor angeschlossen und gemessen von wo bis wo welche Spannung anliegt. Danach habe ich diese Kompassrose (https://de.m.wikipedia.org/wiki/Datei:Kompassrose.svg) aufgeklebt und die Mitte der Bereiche in Grad dazu geschrieben, die als Basis für eine Berechnung dienen. Es sind Augenmaß Werte, kann also durchaus etwas ungenauer aussehen. Hier der Scan meines Papiers (nicht schön aber selten):
Danach habe ich am ESP32 die Analogwerte ermittelt, die je Bereich ausgegeben werden, zwischen zwei Analogwerten die Mitte ermittelt und diese als Basis für die Ermittlung der Richtung genommen (größer-gleich). Die Richtung frage ich einmal pro Sekunde hab und schreibe sie an die entsprechende Position im Array die Richtung.
static int diectionAnalogVal[] = { -1, 128, 463, 880, 1302, 1724, 2143}; // min analog value
// Middle Vals 0 256 670 1091 1514 1934 2352
static int diectionVals[] = { 60, 100, 140, 190, 240, 280, 350}; // directions in degree
int directionCountLastMinute[7];
int directionFirst = 0;
int directionSecond = 0;
int directionMostCalculated = 0;Einmal pro Sekunde rufe ich die Funktion checkDirection() via Task Scheduler auf, die dann das Array entsprechend beschreibt:
void checkDirection()
{
int actualSecond = timeClient.getSeconds();
if (actualSecond > -1 && actualSecond < 60)
{
int analogVal = analogRead(windDirectionPin);
int direction = 0;
for (int i=0; i<7 && (analogVal > diectionAnalogVal[i]); i++)
{
direction = diectionVals[i];
}
oneSecondWindDirection[actualSecond] = direction;
Serial.println("WindDirectionAnalogVal: " + (String)analogVal);
Serial.println("WindDirectionDegreeVal: " + (String)direction);
}
}Auch hier wird in der Funktion changeMinute() das aktuelle Array mit den Werten in das Array der vorigen Minuten kopiert, um dann Berechnungen durch zu führen.
memcpy(oneSecondWindDirectionLastMinute, oneSecondWindDirection, sizeof(oneSecondWindDirection));
for (int i=0; i<60; i++)
{
oneSecondWindDirection[i] = 0;
}Komplexer wird die Berechnung der gemittelten Windrichtung. Zunächst ermittle ich die beiden am meisten auftretenden Richtungen. Danach ermittle ich welcher Weg (im oder gegen den Uhrzeigersinn) der kürzere ist. Die “Distanz” zwischen den beiden Gradzahlen wird dann ermittelt und durch die Summe der beiden am häufigsten auftretenden Windrichtungen geteilt und dann entsprechend mit einer der beiden multipliziert und dazu addiert bzw. subtrahiert. Ein einfaches Beispiel: 20x 0° und 30x 100° -> 100-0 -> 100 / (20+30) -> 2° je Messung -> 20 x 2° -> 40° -> 0° + 40° -> 40° -> Nord-Ost. Das passiert in der Funktion buildLastMinuteVals() in den Kommentaren hinter den Berechnungen finden sich die Beispiele mit denen man die entsprechenden Bereiche durchläuft:
// wind direction
// prepararion
for(int i=0; i<7; i++)
{
directionCountLastMinute[i] = 0;
}
directionFirst = -1;
directionSecond = -1;
directionMostCalculated = 0;
for (int i=0; i<60; i++)
{
int workVal = oneSecondWindDirectionLastMinute[i];
for (int j=0; j<7; j++)
{
if (workVal == diectionVals[j])
{
directionCountLastMinute[j]++;
}
}
}
// check which is most used
for (int i=0; i<7; i++)
{
if (directionCountLastMinute[i] > directionCountLastMinute[directionFirst] || directionFirst == -1)
{
directionFirst = i;
}
}
// check which is second most used
for (int i=0; i<7; i++)
{
if (i != directionFirst)
{
if (directionCountLastMinute[i] > directionCountLastMinute[directionSecond] || directionSecond == -1 )
{
directionSecond = i;
}
}
}
if (directionFirst == -1)
{
directionFirst = 0;
}
if (directionSecond == -1)
{
directionSecond = directionFirst;
}
Serial.println("First direction: " + (String)directionFirst + " / Count: " + (String)directionCountLastMinute[directionFirst]);
Serial.println("Senco direction: " + (String)directionSecond + " / Count: " + (String)directionCountLastMinute[directionSecond]);
if (directionCountLastMinute[directionFirst] > 0 || directionCountLastMinute[directionSecond] > 0) // otherwise we have zero division
{
int workVal = 0;
double degreePerCount;
if (diectionVals[directionFirst] < diectionVals[directionSecond]) // 10 / 100 | 10 / 200 | 10 / 350
{
if (diectionVals[directionFirst] + 180 >= diectionVals[directionSecond]) // 10 / 100
{
workVal = diectionVals[directionSecond] - diectionVals[directionFirst];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionFirst] + (degreePerCount * directionCountLastMinute[directionSecond]);
}
else if (diectionVals[directionFirst] + 180 < diectionVals[directionSecond]) // 10 / 200
{
workVal = 360 - diectionVals[directionSecond] + diectionVals[directionFirst];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionSecond] + (degreePerCount * directionCountLastMinute[directionFirst]);
}
else // 10 / 350
{
workVal = 180 - diectionVals[directionSecond] + diectionVals[directionFirst];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionSecond] + (degreePerCount * directionCountLastMinute[directionFirst]);
}
}
else if (diectionVals[directionFirst] > diectionVals[directionSecond]) // 100 / 10 | 200 / 10 | 350 / 10
{
if (diectionVals[directionSecond] + 180 >= diectionVals[directionSecond]) // 100 / 10
{
workVal = diectionVals[directionFirst] - diectionVals[directionSecond];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionSecond] + (degreePerCount * directionCountLastMinute[directionFirst]);
}
else if (diectionVals[directionSecond] + 180 < diectionVals[directionSecond]) // 200 / 10
{
workVal = 360 - diectionVals[directionFirst] + diectionVals[directionSecond];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionFirst] + (degreePerCount * directionCountLastMinute[directionSecond]);
}
else // 350 / 10
{
workVal = 180 - diectionVals[directionFirst] + diectionVals[directionSecond];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionFirst] + (degreePerCount * directionCountLastMinute[directionSecond]);
}
}
while (directionMostCalculated > 360)
{
directionMostCalculated -= 360;
}
}
else
{
directionMostCalculated = 0;
}Die Ermittlung der Texte zu den Gradzahlen ist relativ einfach:
String getWindDirectionDescriptionFromDegree(int degreeIn)
{
String retStr = "";
if (degreeIn > -1) // 22.5 / 11.25 / round all
{
if (degreeIn >= 349 || degreeIn < 12) // 348.75 / 11.5
{
retStr = "N";
}
else if (degreeIn >= 12 && degreeIn < 34) // 11.5 / 34
{
retStr = "NNO";
}
else if (degreeIn >= 34 && degreeIn < 57) // 34 / 56.5
{
retStr = "NO";
}
else if (degreeIn >= 57 && degreeIn < 79) // 56.5 / 79
{
retStr = "ONO";
}
else if (degreeIn >= 79 && degreeIn < 102) // 79 / 101.5
{
retStr = "O";
}
else if (degreeIn >= 102 && degreeIn < 124) // 101.5 / 124
{
retStr = "OSO";
}
else if (degreeIn >= 124 && degreeIn < 147) // 124 / 146.5
{
retStr = "SO";
}
else if (degreeIn >= 147 && degreeIn < 169) // 146.5 / 169
{
retStr = "SSO";
}
else if (degreeIn >= 169 && degreeIn < 192) // 169 / 191.5
{
retStr = "S";
}
else if (degreeIn >= 192 && degreeIn < 214) // 191.5 / 214
{
retStr = "SSW";
}
else if (degreeIn >= 214 && degreeIn < 237) // 214 / 236.5
{
retStr = "SW";
}
else if (degreeIn >= 237 && degreeIn < 259) // 236.5 / 259
{
retStr = "WSW";
}
else if (degreeIn >= 259 && degreeIn < 282) // 259 / 281.5
{
retStr = "W";
}
else if (degreeIn >= 282 && degreeIn < 304) // 281.5 / 304
{
retStr = "WNW";
}
else if (degreeIn >= 304 && degreeIn < 327) // 304 / 326.5
{
retStr = "NW";
}
else if (degreeIn >= 327 && degreeIn < 349) // 326.5 / 349
{
retStr = "NNW";
}
}
return retStr;
}Die Initialisierung des Servers und Rückgabe der Werte als JSON erwähne ich an dieser Stelle nicht explizit.
Code
#include <ArduinoJson.h>
#include <WebServer.h>
#include <TaskScheduler.h>
#include <NTPClient.h>
#include <WiFiUdp.h>
// --------- WIFI -----------
#define STASSID "" // wifi name
#define STAPSK "" // wifi pw
#define DEVICENAME "ESP32-Wind";
unsigned long previousMillis = 0;
unsigned long interval = 2000;
// --------- END WIFI -------
// --------- INITS -------
const char* ssid = STASSID;
const char* password = STAPSK;
const char* deviceName = DEVICENAME;
WiFiUDP ntpUDP;
NTPClient timeClient(ntpUDP, "de.pool.ntp.org", 0, 0);
WebServer server(80);
StaticJsonDocument<1024> jsonDocument;
char jsonBuffer[1024];
// --------- END INITS -------
// --------- SCHEDULER BEGIN -------
void checkFreeRam();
Task scheduleCheckFreeRam(21*1000, TASK_FOREVER, &checkFreeRam);
void wifiReconnectCheck();
Task scheduleWifiReconnectCheck(5*1000, TASK_FOREVER, &wifiReconnectCheck);
void refreshTime();
Task scheduleRefreshTime(10*60*1000, TASK_FOREVER, &refreshTime);
void changeMinute();
Task scheduleChangeMinute(1000, TASK_FOREVER, &changeMinute);
void checkDirection();
Task scheduleCheckDirection(1000, TASK_FOREVER, &checkDirection);
Scheduler runner;
// --------- SCHEDULER END ---------
// ------- DEFINITIONS ----------
static String linkColorNormal = "#2321B0";
static String linkColorVisited = "#2321B0";
static String activeMarkerBegin = "<b>»";
static String activeMarkerEnd = "«</b>";
// ------- END DEFINITIONS ----------
// ------- PINS ----------
static int morsePin = 2;
static int i2cSdaPin = 21;
static int i2cSclPin = 22;
static int windSpeedPin = 26;
static int windDirectionPin = 34;
// ------- END PINS ----------
// --------- Variables ---------
int freeHeap = 0;
int actualMin = 0;
int actualTenSecond = 0;
static double speedResolution = 0.0875; // m/s per tick per second
int oneSecondWindTicks[60];
int oneSecondWindTicksLastMinute[60];
int minuteTicksSum;
double minuteWindSpeedAvgMS; // m/s
double minuteWindSpeedMinMS; // m/s
double minuteWindSpeedMaxMS; // m/s
static int diectionAnalogVal[] = { -1, 128, 463, 880, 1302, 1724, 2143}; // min analog value
// Middle Vals 0 256 670 1091 1514 1934 2352
static int diectionVals[] = { 60, 100, 140, 190, 240, 280, 350}; // directions in degree
int directionCountLastMinute[7];
int directionFirst = 0;
int directionSecond = 0;
int directionMostCalculated = 0;
int oneSecondWindDirection[60];
int oneSecondWindDirectionLastMinute[60];
// --------- END Variables ---------
// --------- Interrupt Functions -----------
void IRAM_ATTR eventWindSpeedTick()
{
int actualSecond = timeClient.getSeconds();
if (actualSecond > -1 && actualSecond < 60)
{
oneSecondWindTicks[actualSecond]++;
}
}
// --------- END Interrupt Functions -----------
void setup()
{
initSerial();
initWifi();
initSchedules();
initPinModes();
initTimeClient();
initServer();
checkFreeRam();
}
void loop()
{
// put your main code here, to run repeatedly:
server.handleClient();
runner.execute();
}
void initSerial()
{
Serial.begin(115200);
while(!Serial){} // Waiting for serial connection
Serial.println();
}
void initWifi()
{
Serial.println("WiFi init");
Serial.print("Wifi: ");
Serial.println(ssid);
//Serial.print("WifiPW: ");
//Serial.println(password);
Serial.println("turn wifi off...");
WiFi.mode(WIFI_OFF);
delay(10);
//WiFi.forceSleepBegin();
delay(200);
//WiFi.forceSleepWake();
WiFi.mode(WIFI_STA);
delay(250);
WiFi.config(INADDR_NONE, INADDR_NONE, INADDR_NONE);
delay(200);
//WiFi.mode(WIFI_STA);
Serial.println("setting hostname");
WiFi.setHostname(deviceName);
delay(200);
Serial.println("Connecting to WiFi..");
WiFi.begin(ssid, password);
delay(200);
int iCounter = 0;
int iMax = 30;
while (WiFi.status() != WL_CONNECTED && iCounter < iMax)
{
digitalWrite(morsePin, LOW);
delay(500);
digitalWrite(morsePin, HIGH);
delay(500);
Serial.print(".");
iCounter++;
}
Serial.println(WiFi.localIP());
}
void initPinModes()
{
Serial.println("PIN MODES init");
pinMode(morsePin, OUTPUT);
digitalWrite(morsePin, LOW);
pinMode(windSpeedPin, INPUT);
attachInterrupt(digitalPinToInterrupt(windSpeedPin), eventWindSpeedTick, FALLING);
analogRead(windDirectionPin);
}
void initSchedules()
{
Serial.println("SCHEDULES init");
runner.init();
runner.addTask(scheduleCheckFreeRam);
scheduleCheckFreeRam.enable();
runner.addTask(scheduleWifiReconnectCheck);
scheduleWifiReconnectCheck.enable();
runner.addTask(scheduleRefreshTime);
scheduleRefreshTime.enable();
runner.addTask(scheduleChangeMinute);
scheduleChangeMinute.enable();
runner.addTask(scheduleCheckDirection);
scheduleCheckDirection.enable();
}
void initTimeClient()
{
timeClient.begin();
delay(1000);
timeClient.update();
}
void initServer()
{
server.on("/", handleConnect);
server.on("/jsondoaction", jsonDoAct);
server.on("/jsondoaction", HTTP_POST, jsonDoAct);
server.onNotFound(handleConnect);
server.begin();
Serial.println("HTTP server started");
}
void wifiReconnectCheck()
{
unsigned long currentMillis = millis();
// if WiFi is down, try reconnecting every CHECK_WIFI_TIME seconds
if ((WiFi.status() != WL_CONNECTED) && (currentMillis - previousMillis >=interval))
{
Serial.print(millis());
Serial.println("Reconnecting to WiFi...");
WiFi.disconnect();
WiFi.reconnect();
previousMillis = currentMillis;
}
}
void refreshTime()
{
timeClient.update();
}
void changeMinute()
{
if (timeClient.getMinutes() != actualMin)
{
Serial.println("Changing Minute...");
actualMin = timeClient.getMinutes();
memcpy(oneSecondWindTicksLastMinute, oneSecondWindTicks, sizeof(oneSecondWindTicks));
memcpy(oneSecondWindDirectionLastMinute, oneSecondWindDirection, sizeof(oneSecondWindDirection));
//Serial.print("Arrays old/new: ");
for (int i=0; i<60; i++)
{
oneSecondWindTicks[i] = 0;
//Serial.print(" " + (String)oneSecondWindTicksLastMinute[i] + "/" + (String)oneSecondWindTicks[i]);
}
for (int i=0; i<60; i++)
{
oneSecondWindDirection[i] = 0;
//Serial.print(" " + (String)oneSecondWindDirectionLastMinute[i] + "/" + (String)oneSecondWindDirection[i]);
}
//Serial.println();
buildLastMinuteVals();
}
}
void buildLastMinuteVals()
{
// wind speed
int minTickVal = oneSecondWindTicksLastMinute[0];
int maxTickVal = 0;
minuteTicksSum = 0;
for (int i=0; i<60; i++)
{
int workVal = oneSecondWindTicksLastMinute[i];
if (workVal < 1000)
{
if (workVal < minTickVal) // set min
{
minTickVal = workVal;
}
if (workVal > maxTickVal) // set max
{
maxTickVal = workVal;
}
minuteTicksSum += workVal; // add to sum
}
}
double avgTickVal = (double)minuteTicksSum / (double)60;
// convert to m/s
minuteWindSpeedAvgMS = avgTickVal * speedResolution;
minuteWindSpeedMinMS = (double)minTickVal * speedResolution;
minuteWindSpeedMaxMS = (double)maxTickVal * speedResolution;
// wind direction
// prepararion
for(int i=0; i<7; i++)
{
directionCountLastMinute[i] = 0;
}
directionFirst = -1;
directionSecond = -1;
directionMostCalculated = 0;
for (int i=0; i<60; i++)
{
int workVal = oneSecondWindDirectionLastMinute[i];
for (int j=0; j<7; j++)
{
if (workVal == diectionVals[j])
{
directionCountLastMinute[j]++;
}
}
}
// check which is most used
for (int i=0; i<7; i++)
{
if (directionCountLastMinute[i] > directionCountLastMinute[directionFirst] || directionFirst == -1)
{
directionFirst = i;
}
}
// check which is second most used
for (int i=0; i<7; i++)
{
if (i != directionFirst)
{
if (directionCountLastMinute[i] > directionCountLastMinute[directionSecond] || directionSecond == -1 )
{
directionSecond = i;
}
}
}
if (directionFirst == -1)
{
directionFirst = 0;
}
if (directionSecond == -1)
{
directionSecond = directionFirst;
}
Serial.println("First direction: " + (String)directionFirst + " / Count: " + (String)directionCountLastMinute[directionFirst]);
Serial.println("Senco direction: " + (String)directionSecond + " / Count: " + (String)directionCountLastMinute[directionSecond]);
if (directionCountLastMinute[directionFirst] > 0 || directionCountLastMinute[directionSecond] > 0) // otherwise we have zero division
{
int workVal = 0;
double degreePerCount;
if (diectionVals[directionFirst] < diectionVals[directionSecond]) // 10 / 100 | 10 / 200 | 10 / 350
{
if (diectionVals[directionFirst] + 180 >= diectionVals[directionSecond]) // 10 / 100
{
workVal = diectionVals[directionSecond] - diectionVals[directionFirst];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionFirst] + (degreePerCount * directionCountLastMinute[directionSecond]);
}
else if (diectionVals[directionFirst] + 180 < diectionVals[directionSecond]) // 10 / 200
{
workVal = 360 - diectionVals[directionSecond] + diectionVals[directionFirst];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionSecond] + (degreePerCount * directionCountLastMinute[directionFirst]);
}
else // 10 / 350
{
workVal = 180 - diectionVals[directionSecond] + diectionVals[directionFirst];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionSecond] + (degreePerCount * directionCountLastMinute[directionFirst]);
}
}
else if (diectionVals[directionFirst] > diectionVals[directionSecond]) // 100 / 10 | 200 / 10 | 350 / 10
{
if (diectionVals[directionSecond] + 180 >= diectionVals[directionSecond]) // 100 / 10
{
workVal = diectionVals[directionFirst] - diectionVals[directionSecond];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionSecond] + (degreePerCount * directionCountLastMinute[directionFirst]);
}
else if (diectionVals[directionSecond] + 180 < diectionVals[directionSecond]) // 200 / 10
{
workVal = 360 - diectionVals[directionFirst] + diectionVals[directionSecond];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionFirst] + (degreePerCount * directionCountLastMinute[directionSecond]);
}
else // 350 / 10
{
workVal = 180 - diectionVals[directionFirst] + diectionVals[directionSecond];
degreePerCount = (double)workVal / (directionCountLastMinute[directionFirst] + directionCountLastMinute[directionSecond]);
directionMostCalculated = diectionVals[directionFirst] + (degreePerCount * directionCountLastMinute[directionSecond]);
}
}
while (directionMostCalculated > 360)
{
directionMostCalculated -= 360;
}
}
else
{
directionMostCalculated = 0;
}
}
String getWindDirectionDescriptionFromDegree(int degreeIn)
{
String retStr = "";
if (degreeIn > -1) // 22.5 / 11.25 / round all
{
if (degreeIn >= 349 || degreeIn < 12) // 348.75 / 11.5
{
retStr = "N";
}
else if (degreeIn >= 12 && degreeIn < 34) // 11.5 / 34
{
retStr = "NNO";
}
else if (degreeIn >= 34 && degreeIn < 57) // 34 / 56.5
{
retStr = "NO";
}
else if (degreeIn >= 57 && degreeIn < 79) // 56.5 / 79
{
retStr = "ONO";
}
else if (degreeIn >= 79 && degreeIn < 102) // 79 / 101.5
{
retStr = "O";
}
else if (degreeIn >= 102 && degreeIn < 124) // 101.5 / 124
{
retStr = "OSO";
}
else if (degreeIn >= 124 && degreeIn < 147) // 124 / 146.5
{
retStr = "SO";
}
else if (degreeIn >= 147 && degreeIn < 169) // 146.5 / 169
{
retStr = "SSO";
}
else if (degreeIn >= 169 && degreeIn < 192) // 169 / 191.5
{
retStr = "S";
}
else if (degreeIn >= 192 && degreeIn < 214) // 191.5 / 214
{
retStr = "SSW";
}
else if (degreeIn >= 214 && degreeIn < 237) // 214 / 236.5
{
retStr = "SW";
}
else if (degreeIn >= 237 && degreeIn < 259) // 236.5 / 259
{
retStr = "WSW";
}
else if (degreeIn >= 259 && degreeIn < 282) // 259 / 281.5
{
retStr = "W";
}
else if (degreeIn >= 282 && degreeIn < 304) // 281.5 / 304
{
retStr = "WNW";
}
else if (degreeIn >= 304 && degreeIn < 327) // 304 / 326.5
{
retStr = "NW";
}
else if (degreeIn >= 327 && degreeIn < 349) // 326.5 / 349
{
retStr = "NNW";
}
}
return retStr;
}
double convertMsToKmh(double msValIn)
{
double tmpVal = msValIn * (double)3.6;
return tmpVal;
}
void checkDirection()
{
int actualSecond = timeClient.getSeconds();
if (actualSecond > -1 && actualSecond < 60)
{
int analogVal = analogRead(windDirectionPin);
int direction = 0;
for (int i=0; i<7 && (analogVal > diectionAnalogVal[i]); i++)
{
direction = diectionVals[i];
}
oneSecondWindDirection[actualSecond] = direction;
Serial.println("WindDirectionAnalogVal: " + (String)analogVal);
Serial.println("WindDirectionDegreeVal: " + (String)direction);
}
}
void checkFreeRam()
{
freeHeap = ESP.getFreeHeap();
if (ESP.getFreeHeap() < 60000)
{
ESP.restart();
}
//Serial.println("Free RAM: " + String(ESP.getFreeHeap()));
}
void handleConnect()
{
Serial.println("Connect");
server.send(200, "text/html", SendHTML(""));
}
String SendHTML(String context)
{
String ptr = "<!DOCTYPE html> <html>\n";
ptr +="<head><meta name=\"viewport\" content=\"width=device-width, initial-scale=1.0, user-scalable=no\">\n";
ptr +="<title>ESP32 Wind</title>\n";
ptr +="<style>html { font-family: Arial; display: inline-block; margin: 0px auto; text-align: center;}\n";
ptr +="body{margin-top: 50px;} h1 {color: #444444;margin: 50px auto 30px;} h3 {color: #444444;margin-bottom: 50px;}\n";
ptr +=".button {display: block;width: 80px;background-color: #3498db;border: none;color: white;padding: 13px 30px;text-decoration: none;font-size: 25px;margin: 0px auto 35px;cursor: pointer;border-radius: 4px;}\n";
ptr +="a, a:active, { color: " + linkColorNormal + "; text-decoration: underline; }\n";
ptr +="a:visited { color: " + linkColorVisited + "; text-decoration: underline; }\n";
ptr +="p {font-size: 14px;color: #888;margin-bottom: 10px;}\n";
ptr +="</style>\n";
ptr +="</head>\n";
ptr +="<body>\n";
ptr +="<h1>ESP32 Wind</h1>\n";
String lineBreak = "<br><br>";
ptr += "";
ptr +="</body>\n";
ptr +="</html>\n";
return ptr;
}
void jsonDoAct()
{
Serial.println("JSON Act");
String status = "OK";
if (server.hasArg("plain") == false)
{
//handle error here
}
String body = server.arg("plain");
Serial.println(body);
deserializeJson(jsonDocument, body);
createStatusJson(status);
server.send(200, "application/json", jsonBuffer);
}
// -------------------- JSON HELPER --------------------------
void createStatusJson(String statusIn)
{
if (statusIn == "")
{
statusIn = "OK";
}
jsonDocument.clear();
jsonDocument["state"] = statusIn;
jsonDocument["windSpeedMinuteTicksSum"] = minuteTicksSum;
jsonDocument["windSpeedMinuteAvgMS"] = minuteWindSpeedAvgMS;
jsonDocument["windSpeedMinuteMinMS"] = minuteWindSpeedMinMS;
jsonDocument["windSpeedMinuteMaxMS"] = minuteWindSpeedMaxMS;
jsonDocument["windSpeedMinuteAvgKMH"] = convertMsToKmh(minuteWindSpeedAvgMS);
jsonDocument["windSpeedMinuteMinKMH"] = convertMsToKmh(minuteWindSpeedMinMS);
jsonDocument["windSpeedMinuteMaxKMH"] = convertMsToKmh(minuteWindSpeedMaxMS);
jsonDocument["windDirectionDirectionFirstDegree"] = diectionVals[directionFirst];
jsonDocument["windDirectionDirectionFirstCount"] = directionCountLastMinute[directionFirst];
jsonDocument["windDirectionDirectionFirstText"] = getWindDirectionDescriptionFromDegree(diectionVals[directionFirst]);
jsonDocument["windDirectionDirectionSecondDegree"] = diectionVals[directionSecond];
jsonDocument["windDirectionDirectionSecondCount"] = directionCountLastMinute[directionSecond];
jsonDocument["windDirectionDirectionSecondText"] = getWindDirectionDescriptionFromDegree(diectionVals[directionSecond]);
jsonDocument["windDirectionCalculatedDegree"] = directionMostCalculated;
jsonDocument["windDirectionCalculatedText"] = getWindDirectionDescriptionFromDegree(directionMostCalculated);
jsonDocument["freeram"] = freeHeap;
serializeJson(jsonDocument, jsonBuffer);
}
Hinweis
Dieser Artikel dokumentiert lediglich meinen Aufbau. Für den Nachbau, die Nutzung einzelner Komponenten, die Platinen und den gesamten Inhalt wird die Haftung in jeglicher Form ausgeschlossen.
16 replies on “Windgeschwindigkeit und Windrichtung mit ESP32 erfassen”
Hallo Kai
Würde sowas wie dein WX-Aufbau auch mit LoRa gehen?
Grüße Manfred DL2GKM
Hallo Manfred,
ja, das sollte auch mit LoRa funktionieren, allerdings würde ich dann den ESP aktiv die Daten senden lassen (1x pro Minute), statt sie abholen zu lassen.
Viele Grüße,
DK1TEO
Hallo Kai
Dankeschön für die Info,bin dabei genau so eine WX-Station zu Bauen mit 3 Schalenkreuz und Windrichter aus Aluminiumlegierung-Hardware.Das soll auf ein Hohen Standort (Turm)Extreme Wetterverhältise Stand halten (hi).
Es gibt den Windgeber mit einem Schnittstellen Type 485 der wurde mir empfolen da die Kabellänge min 25m beträgt.Da suche ich noch infos wie man das mit LoRa-Board Einsetzen könnte zum Versenden ins APRS-Netz.
Grüße aus Reutlingen de Manfred DL2GKM
Hallo Manfred,
meines Wissens gibt es fertige ESP32 LoRa Boards, die sich möglicherweise dafür nutzen lassen.
Ich selbst habe die Anforderung Daten über LoRa zu versenden bisher noch nicht gehabt, deshalb habe ich mich damit noch nicht im Detail beschäftigt.
Viele Grüße de DK1TEO
Hallo Kai
Werde mir mal die WX-Station von DJ7OO (.kh-gps.de/LoRa_WX.htm)Aufbauen die PCB habe ich hier auch am Start.Da gehen ja auch Windgeber mit Impuls-Signale.Weiß nur nicht bei lange Kabeln,da wollte ich die 485 Schnittstellen-Type für Sichere Datenübertragung.
Grüße Manfred DL2GKM
Hallo Manfred,
es gibt viele gute Projekte im Netz.
Dieses Projekt kannte ich bisher noch nicht, danke für den Hinweis, schaue ich mir auf jeden Fall an.
Zur RS485 Schnittstelle und maximalen Leitungslängen sollte es entsprechende Dokumentationen im Netz geben.
Viele Grüße de DK1TEO
Hallo erstmal ein tolles Projekt bin gerade es nach zu bauen habe allerdings das Problem das nach einem reset des esp daten am home assistant ankommen einmalig danach nicht mehr
Vielen Dank! – Ist der ESP über das Netzwerk erreichbar und liefert lediglich keine Daten mehr oder meldet er sich vom Netzwerk ab? – Wenn der ESP an der USB Schnittstelle angeschlossen ist, wird ein Fehler ausgegeben?
Hallo
Woher stammmen die mechanische Teile Windfahne und Windmesser?
Es gibt die in China mit RS485, 0-5V , 4-20mA ,0-10V Schnittstellen
welche haben Sie verwendet
Hallo Bernd,
die Teile habe ich online bestellt.
Der Windgeschwindigkeitsmesser gibt einfache Low-High Signale zurück und je nach dem wie viele Low-High Signale pro Sekunde anliegen, ist die Windgeschwindigkeit zu erreichnen.
Der Umrechnungsfaktor ist den Technischen Daten des Windgeschwinidgkeitsmessers zu entnehmen.
Die Windfahne gibt eine Spannung zwischen 0-5V aus, diese Spannung muss dann mit einem Spannungsteiler entsprechend unter 3.3V gebracht werden, um den ESP32 nicht zu beschädigen.
Viele Grüße DK1TEO
Hi,
hast du eventuell einen konkreten Link zu dem “richtigen” Windgeschwindigkeitsmesser und der Windfahne, die man für deine Schaltung verwenden kann? Ich finde sehr viele davon und bin nicht sicher, welcher zu benutzen ist.
Grüße
Tim
Hallo Tim,
dort wo ich meinen bestellt habe, gibt es ihn nicht mehr, ich müsste selbst einen neuen raussuchen.
Wichtig ist, dass die Spannung stimmt und dass es ein NPN(/PNP) Geschwindigkeitsmesser ist, dann können die “Ticks” mit der Schaltung gut abgegriffen und ausgewertet werden.
Wenn Du explizite Fragen hast, sende mir gerne eine E-Mail.
Viele Grüße DK1TEO
Hi
Woher stammt die Bibliothek WiFiUdp.h die anderen Bibliotheken
habe ich gefunden.
73 Dl3Bla
Hallo Bernd,
die Bibliothek ist in der Arduino Standard ESP32 Board Bibliothek enthalten und kann ohne weiteres direkt eingebunden werden.
73 de DK1TEO
Hallo,
ich wundere mich, warum dein Windrichtungsgeber nur 7 verschiedene Spannungen abgibt (0V, 0.8V, 1.4V, 2.1V, 3V, 3,6V, 3,9V). Du scheinst die Version mit 0-5V Ausgang zu haben, ich habe die Version 0-10V.
In der Beschreibung stehen für die 5V Version die Spannungen 0.0, 0.71, 1.42, 2.14, 2.86, 3.57, 4.29 und 5.0V.
Für die 0-10V Version steht ausdrücklich, dass sie mit 24V betrieben werden muss. Ich hatte Anfangs denselben Effekt (nur 7 Steps), aber nachdem ich mit einem Step-Up Regler aus 5V dann 24V gemacht habe, stimmten alle Werte und ich bekomme die acht Schritte, wie sie in der Doku stehen.
Für die Windgeschwindigkeit habe ich diesen Typ genommen:
[Typ: 5-30V]
Er wird mit 5-30V versorgt und hat einen Open-Collector NPN Ausgang, den ich direkt auf einen GPIO gelegt habe, weil die Spannung < 3.3V ist.
hier der Code:
#define WINDSPEEDPIN 26
pinMode(WINDSPEEDPIN, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(WINDSPEEDPIN), eventWindSpeedTick, RISING);
Ich werde noch überprüfen, ob die Bereiche der acht Windrichtungen unterschiedlich groß sind.
Hallo, ich habe noch eine Anmerkung. Du kannst die äußerst komplizierte mittlere Windrichtungsbestimmung sehr stark vereinfachen.
Man umgeht auch das Problem: angenommen der Wind kommt 30 Sekunden aus 355 Grad und 30 Sekunden aus 5 Grad (also um Nord). Dann wäre das arithmetische Mittel 180 Grad (Süd). –> falsch.
In der Meteorologie wird die Richtung durch Vektorrechnung ermittelt. Man geht dabei wie folgt vor:
– schreibe die sekündlich gemessenen Richtungswerte in einen Speicher, auf den indiziert zugegriffen werden kann.
– nach Ablauf der Messperiode werden die Einzelwerte in ihre Sinus und Cosinus Anteile zerlegt ubnd jeweils von x und y die Summe gebildet.
– danach wieder aus den Summen mit atan() wieder auf den Winkel zurückrechnen. Danach die Quadrantenbestimmung nicht vergessen.
Mein Code:
for (int8_t i = 0; i = 0 && fSumY >= 0) {
m_fSampleAvgValue = fW;
} else if (fSumX >= 0 && fSumY < 0) {
m_fSampleAvgValue = 180.0 – fW;
} else if (fSumX = 0) {
m_fSampleAvgValue = 360.0 – fW;
} else if (fSumX < 0 && fSumY < 0) {
m_fSampleAvgValue = 180.0 + fW;
}
Damit bekommt man jeden Winkelwert (soweit der Sensor sich auch bewegt) – und nicht nur die 8, die das Gerät liefert.
Hier noch eine bessere Erklärung:
[link entfernt]