Nachdem es im Sommer im Gartenhaus etwas warm wird, habe ich mich dazu entschlossen eine automatische Belüftung zu entwickeln. Hier beschreibe ich dieses Projekt.
Problem
Im Gartenhaus wird es im Sommer immer etwas warm. Wenn man dort Pflanzensamen oder ähnliches lagert, ist Hitze diesen nicht besonders zuträglich. Ein Fenster dauerhaft offen lassen, wollte ich nicht. Es musste eine flexible Lösung sein. Zudem sollte die Lösung nicht teuer sein.
Auch wollte ich keine manuelle Lösung, sondern eine, die sich zwar Manuell schalten lässt, aber im Normalbetrieb automatisch abhängig von Innen und Außentemperatur schaltet. Es ist nicht zielführend, wenn es innen bereits kalt ist und durch die Lüftung noch kälter wird oder im umgekehrten Fall draußen wärmer als im Gartenhaus ist und der Lüfter die Wärme ins Gebäude zieht.
Lösung
Da ich noch einige ältere PC-Lüfter in einer Kiste hatte, war die Idee mit diesen eine Belüftung zu bauen. Zudem sollte eine Elektronik Innen- sowie Außentemperatur erfassen und anhand dessen entscheiden, ob der Lüfter aktiv sein soll.
Hardware
Zur Erfassung der Temperatur habe ich mich für wasserdichte DS18B20 Sensoren entschieden, die je einmal innen und einmal außen montiert werden.
Kontrolliert wird das ganze von einem ESP32 mit 30 PINs, der mit dem WLAN verbunden ist und damit aus dem Netzwerk geschaltet, sowie die Temperatur und Zustandswerte ausgelesen werden können.
Zur Lüftung werden zwei unterschiedlich große PC Lüfter hintereinander verwendet, um einen stärkeren Luftstrom zu gewährleisten. Die Luft wird mit der Entlüftung an der Decke nach draußen befördert, nachströmen kann die Luft über die Spalten z.B. in der Tür oder zwischen den Planken.
Lüfterkonstruktion
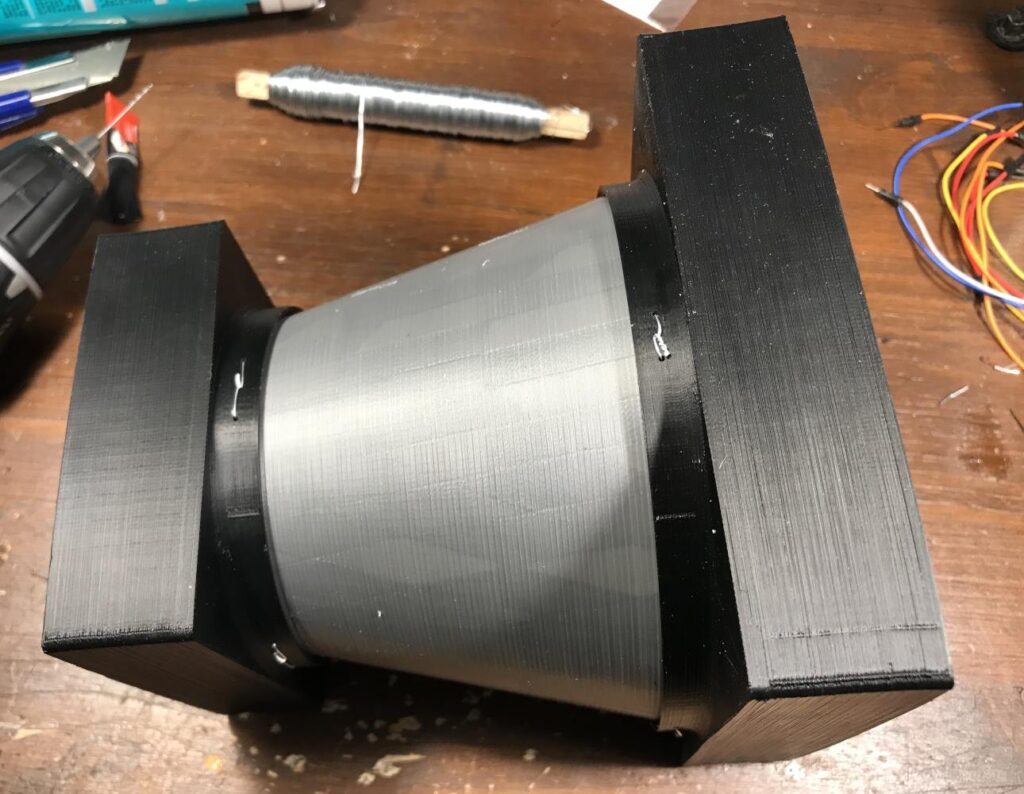
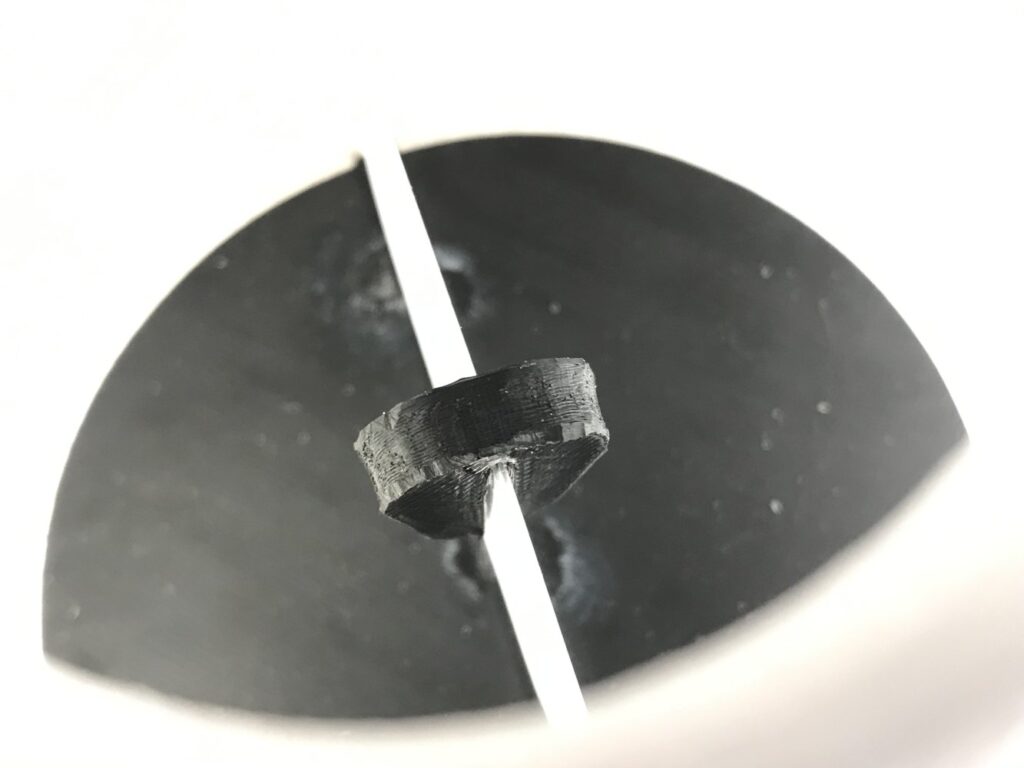
Die Lüfter müssen in einem Kanal hintereinander gebracht werden. Zudem soll ein “Rückschlag”, wenn der Winddruck bei aktivierter Lüftung zu groß wird, sowie das unbeabsichtigte Lüften bei deaktivierten Lüftern verhindert werden. Auch ein “Stehenbleiben” der Lüfter durch zu viel Gegendruck sollte vermieten werden. Da PC-Lüfter in der Regel keinen Starken Luftdruck erzeugen, müssen die Rückschlagklappen sehr leicht sein.
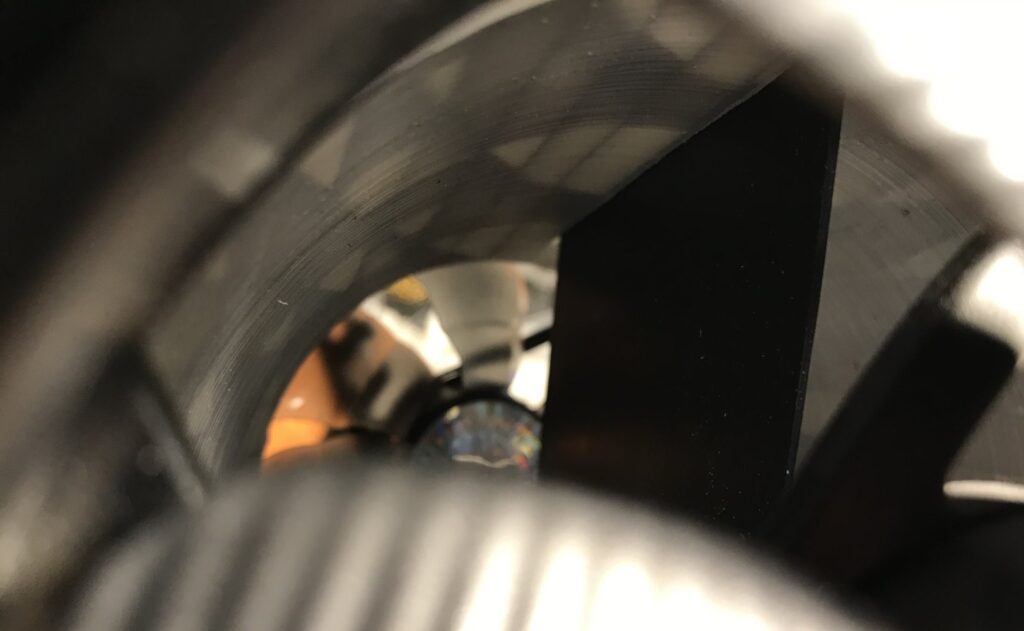
Da es durch das Hintereinanderschalten von Lüftern zu Verwirbelungen in einem Luftkanal kommt habe ich nachträglich eine Art Blatt oder Flügen eingebaut, um dies zu verhindern.

Um auf das DN50 Rohr, welches nach Außen führt, zu kommen, sowie Platz für die Rückschlagklappen zu schaffen, habe ich einen weiteren Körper inklusive einer Art Überwurf gedruckt, damit man den Grundkörper mit dem weiteren Körper verbinden kann.

Die Rückschlagklappen habe ich sehr dünn gedruckt und jeweils an einem Faden mit Sekundenkleber angeklebt.
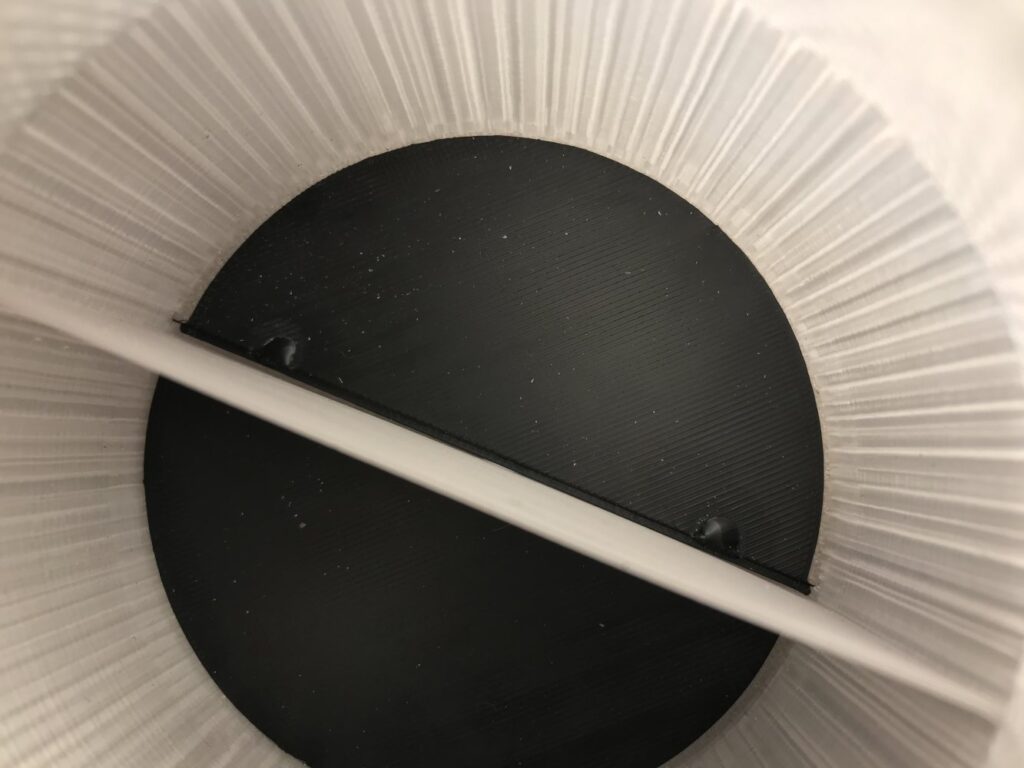
Nach einigen Test habe ich festgestellt, dass die Klappen nicht mehr zu fallen, wenn sie senkrecht stehen.
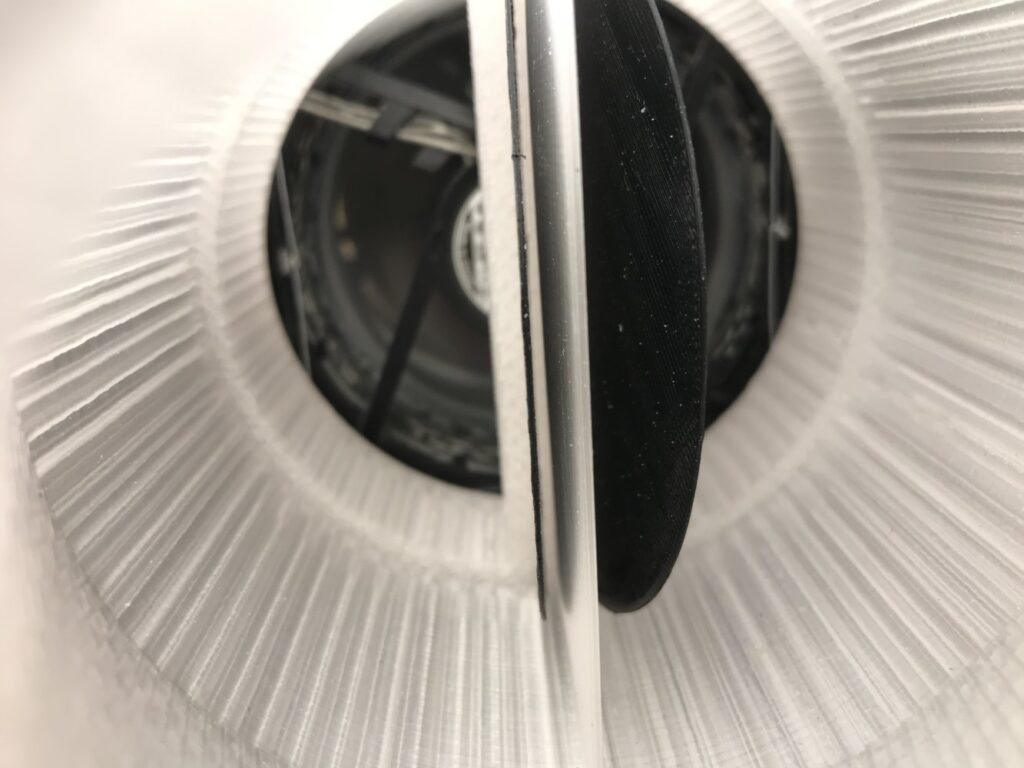
Also musste verhindert werden, dass die Klappen ganz auf gehen.
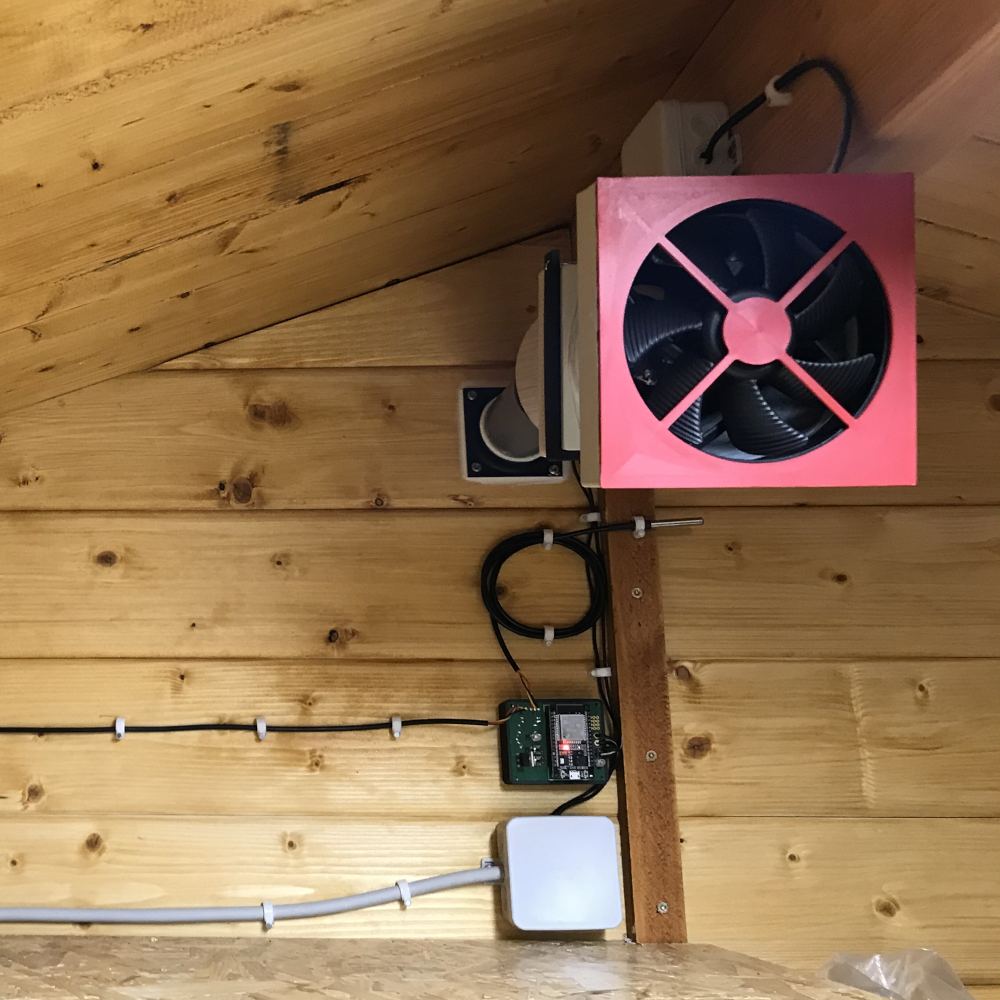
Hier der ganze nach Montage des Rohrstücks und der Durchführung durch die Gartenhauswand. Das graue Rohrstück ist “im Wasser” der Rest des Aufbaus wird “fallend” montiert, damit die Rückschlagklappen von selbst zu fallen.

Mit einer gedruckten Halterung an der Wand befestigt, habe ich den Aufbau dann im Gartenhaus montiert.


Die Abdeckung ist genau wie der Rest aus ABS gedruckt und lackiert, um der Witterung besser Stand zu halten.
Außen, sowie Innensensor sind mit etwas Abstand zur Wand montiert.


Elektronik
Die PC-Lüfter benötigen 12V, ein Microcontroller des Type ESP32 kann jedoch nur 3.3V, sowie nur kleine Ströme liefern. Aus diesem Grund habe ich mich dazu entschieden die Lüfter mit dem ESP32 über einen P-MOSFET zu schalten. Da der MOSFET im Idealfall für Sperren/Schalten entsprechend die Versorgungsspannung von 12V benötigt, wird er MOSFET über einen am ESP32 angeschlossenen Transistor geschaltet.
Hier die Platine dazu (Afillate): https://aisler.net/p/TAHNLBDW
Bauteile
- C1, C2, C3 : 10nF
- IC1 : RECOM R-78E50-05
- L1 : 10 µH
- LED1, LED2 : Standard LEDs
- R1, R2, R3, R8, R9 : 5.6kO
- R5 : 1kO
- R6, R7 : 10kO
- T1 : BC547C
- MOSFET : IRF5210
Software
Teile des Codes, den ich verwende werde ich hier veröffentlichen.
Für das regelmäßige Auslesen der Sensoren, des freien RAMs und das prüfen der benötigten Belüftung verwende ich den Task Scheduler.
Als Interface verwende ich einerseits eine Web-Darstellung, sowie eine JSON Schnittstelle.
Als optimale Innentemperatur habe ich 18°C angegeben, nur wenn die Außentemperatur mindestens 1.5°C näher an der Zieltemperatur liegt, wird die Belüftung aktiviert.
Man kann die Belüftung sowohl über Taster, wie auch über das Webinterface in den manuellen Modus umstellen.
Außerdem verbindet sich der ESP32 nach getrennter WLAN Verbindung erneut automatisch.
Der ESP32 gibt über die onboard LED entsprechend Rückmeldung. Beispielsweise, wenn Sensoren nicht gefunden werden bzw. diese ungültige Werte liefern.
#include <OneWire.h>
#include <DallasTemperature.h>
#include <TaskScheduler.h>
#include <ArduinoJson.h>
#include "WiFi.h"
#include <WebServer.h>
#include <NTPClient.h>
#include <WiFiUdp.h>
[...]
WebServer server(80);
StaticJsonDocument<1024> jsonDocument;
// --------- SCHEDULER BEGIN -------
void readTemperatures();
Task scheduleRead(5000, TASK_FOREVER, &readTemperatures);
void controlAir();
Task scheduleControl(30000, TASK_FOREVER, &controlAir);
void checkFreeRam();
Task scheduleCheckFreeRam(60000, TASK_FOREVER, &checkFreeRam);
Scheduler runner;
// --------- SCHEDULER END ---------
// --------- PIN BEGIN -------------
const int morsePin = 2;
const int innerSensorPin = 32;
const int outerSensorPin = 33;
const int airControlPin = 25;
const int manualControlPin = 26;
const int manualControlSwitchPin = 27;
const int manualOnOffSwitchPin = 13;
// --------- PIN END ---------------
// --------- PIN BEGIN -------------
const int morsePin = 2;
const int innerSensorPin = 32;
const int outerSensorPin = 33;
const int airControlPin = 25;
const int manualControlPin = 26;
const int manualControlSwitchPin = 27;
const int manualOnOffSwitchPin = 13;
// --------- PIN END ---------------
// ------- DEFINITIONS BEGIN -------
static String linkColorNormal = "#2321B0";
static String linkColorVisited = "#2321B0";
static String activeMarkerBegin = "<b>»";
static String activeMarkerEnd = "«</b>";
static float tempInnerOpti = 18;
static float tempDiffToChange = 1.5;
// ------- DEFINITIONS END ----------
// --------- VARS BEGIN ------------
bool airControlState = false;
bool airControlManual = false;
// --------- VARS END --------------
// Setup a oneWire instance to communicate with any OneWire devices
OneWire oneWireInner(innerSensorPin);
OneWire oneWireOuter(outerSensorPin);
// Pass our oneWire reference to Dallas Temperature sensor
DallasTemperature innerSensor(&oneWireInner);
DallasTemperature outerSensor(&oneWireOuter);
float innerTemperature = 0;
float outerTemperature = 0;
void setup()
{
[...]
// ---------- OUTPUT PIN BEGIN ----------
pinMode(airControlPin, OUTPUT);
digitalWrite(airControlPin, LOW);
pinMode(manualControlPin, OUTPUT);
digitalWrite(manualControlPin, LOW);
pinMode(morsePin, OUTPUT);
digitalWrite(morsePin, HIGH);
// ---------- OUTPUT PIN END ------------
// Start the DS18B20 sensor
innerSensor.begin();
outerSensor.begin();
delay(100);
// ---------- WEBSERVER BEGIN -----
server.on("/", handleConnect);
server.on("/auto", handleAuto);
server.on("/manual", handleManual);
server.on("/on", handleOn);
server.on("/off", handleOff);
server.on("/jsonstatus", sendJsonStatus);
server.on("/jsondoaction", jsonDoAct);
server.on("/jsondoaction", HTTP_POST, jsonDoAct);
server.begin();
Serial.println("HTTP server started");
// ---------- WEBSERVER END -------
delay(100);
runner.init();
runner.addTask(scheduleRead);
scheduleRead.enable();
runner.addTask(scheduleControl);
scheduleControl.enable();
runner.addTask(scheduleCheckFreeRam);
scheduleCheckFreeRam.enable();
digitalWrite(morsePin, LOW);
}
void loop()
{
unsigned long currentMillis = millis();
// if WiFi is down, try reconnecting every CHECK_WIFI_TIME seconds
if ((WiFi.status() != WL_CONNECTED) && (currentMillis - previousMillis >=interval))
{
Serial.print(millis());
Serial.println("Reconnecting to WiFi...");
WiFi.disconnect();
WiFi.reconnect();
previousMillis = currentMillis;
}
server.handleClient();
runner.execute();
handleButtons();
//delay(5000);
}
void checkFreeRam()
{
if (ESP.getFreeHeap() < 60000)
{
ESP.restart();
}
Serial.println("Free RAM: " + String(ESP.getFreeHeap()));
}
void handleConnect()
{
Serial.println("WebServer: /");
server.send(200, "text/html", SendHTML(""));
}
void handleButtons()
{
int manualControlSwitchSelect = digitalRead(manualControlSwitchPin);
int manualOnOffSwitchSelect = digitalRead(manualOnOffSwitchPin);
if (manualControlSwitchSelect == 1 || manualOnOffSwitchSelect == 1)
{
delay(20);
manualControlSwitchSelect = digitalRead(manualControlSwitchPin);
manualOnOffSwitchSelect = digitalRead(manualOnOffSwitchPin);
delay(20);
if (manualControlSwitchSelect == 1)
{
digitalWrite(morsePin, HIGH);
if (airControlManual == true)
{
disableManual();
}
else
{
enableManual();
}
delay(200);
digitalWrite(morsePin, LOW);
}
else if (manualOnOffSwitchSelect == 1)
{
if (airControlManual == true)
{
digitalWrite(morsePin, HIGH);
if (airControlState == true)
{
disableAir();
}
else
{
enableAir();
}
delay(200);
digitalWrite(morsePin, LOW);
}
else
{
digitalWrite(morsePin, HIGH);
delay(20);
digitalWrite(morsePin, LOW);
delay(20);
digitalWrite(morsePin, HIGH);
delay(20);
digitalWrite(morsePin, LOW);
delay(20);
digitalWrite(morsePin, HIGH);
delay(20);
digitalWrite(morsePin, LOW);
delay(20);
digitalWrite(morsePin, HIGH);
delay(20);
digitalWrite(morsePin, LOW);
delay(20);
digitalWrite(morsePin, HIGH);
delay(20);
digitalWrite(morsePin, LOW);
delay(20);
}
}
delay(400);
}
}
void handleAuto()
{
Serial.println("WebServer: /auto");
disableManual();
server.sendHeader("Location", String("/"), true);
server.send (302, "text/plain", "");
}
void handleManual()
{
Serial.println("WebServer: /manual");
enableManual();
server.sendHeader("Location", String("/"), true);
server.send (302, "text/plain", "");
}
void handleOn()
{
Serial.println("WebServer: /on");
enableAir();
server.sendHeader("Location", String("/"), true);
server.send (302, "text/plain", "");
}
void handleOff()
{
Serial.println("WebServer: /off");
disableAir();
server.sendHeader("Location", String("/"), true);
server.send (302, "text/plain", "");
}
void sendJsonStatus()
{
Serial.println("JSON Status");
String jsonBuffer = createStatusJson("");
server.send(200, "application/json", jsonBuffer);
}
void jsonDoAct()
{
Serial.println("JSON Act");
if (server.hasArg("plain") == false)
{
//handle error here
}
String body = server.arg("plain");
Serial.println(body);
deserializeJson(jsonDocument, body);
if (jsonDocument.containsKey("manual") == true)
{
int manual = jsonDocument["manual"];
Serial.println("JSON Act - Manual Set to " + (String)manual);
if (manual == 1)
{
enableManual();
}
else if (manual == 0)
{
disableManual();
}
}
if (airControlManual == true)
{
if (jsonDocument.containsKey("fanenabled") == true)
{
int fanenabled = jsonDocument["fanenabled"];
Serial.println("JSON Act - fanenabled Set to " + (String)fanenabled);
if (fanenabled == 1)
{
enableAir();
}
else if (fanenabled == 0)
{
disableAir();
}
}
}
controlAir();
String jsonBuffer = createStatusJson("");
server.send(200, "application/json", jsonBuffer);
}
String createStatusJson(String statusIn)
{
char jsonBuffer[1024];
if (statusIn == "")
{
statusIn = "OK";
}
jsonDocument.clear();
jsonDocument["state"] = statusIn;
jsonDocument["innertemp"] = innerTemperature;
jsonDocument["outertemp"] = outerTemperature;
if (airControlState == true)
{
jsonDocument["fanenabled"] = true;
}
else
{
jsonDocument["fanenabled"] = false;
}
if (airControlManual == true)
{
jsonDocument["manual"] = true;
}
else
{
jsonDocument["manual"] = false;
}
int freeram = ESP.getFreeHeap();
jsonDocument["freeram"] = freeram;
serializeJson(jsonDocument, jsonBuffer);
return String(jsonBuffer);
}
String SendHTML(String context){
String ptr = "<!DOCTYPE html> <html>\n";
ptr +="<head><meta name=\"viewport\" content=\"width=device-width, initial-scale=1.0, user-scalable=no\">\n";
ptr +="<title>ESP32 Air Control</title>\n";
ptr +="<style>html { font-family: Arial; display: inline-block; margin: 0px auto; text-align: center;}\n";
ptr +="body{margin-top: 50px;} h1 {color: #444444;margin: 50px auto 30px;} h3 {color: #444444;margin-bottom: 50px;}\n";
ptr +=".button {display: block;width: 80px;background-color: #3498db;border: none;color: white;padding: 13px 30px;text-decoration: none;font-size: 25px;margin: 0px auto 35px;cursor: pointer;border-radius: 4px;}\n";
ptr +="a, a:active, { color: " + linkColorNormal + "; text-decoration: underline; }\n";
ptr +="a:visited { color: " + linkColorVisited + "; text-decoration: underline; }\n";
ptr +="p {font-size: 14px;color: #888;margin-bottom: 10px;}\n";
ptr +="</style>\n";
ptr +="</head>\n";
ptr +="<body>\n";
ptr +="<h1>ESP32 Air Control</h1>\n";
if (airControlManual == true)
{
ptr +="<h2>Manual Control - ";
}
else
{
ptr +="<h2>Auto Control - ";
}
if (airControlState == true)
{
ptr +="Air: On";
}
else
{
ptr +="Air: Off";
}
ptr += "</h2>";
ptr +="<p>Inner Temp: " + String(innerTemperature) + " °C</p>";
ptr +="<p>Outer Temp: " + String(outerTemperature) + " °C</p>";
ptr +="<br><br>";
if (airControlManual == true)
{
ptr +="<a href=\"/auto\">Enable Auto Control</a><br><br>";
String textToAdd = "<a href=\"/on\">Enable Air</a>";
String lineBreak = "<br><br>";
if (airControlState == true)
{
ptr += activeMarkerBegin + textToAdd + activeMarkerEnd + lineBreak;
}
else
{
ptr += textToAdd + lineBreak;
}
textToAdd = "<a href=\"/off\">Disable Air</a>";
if (airControlState == false)
{
ptr += activeMarkerBegin + textToAdd + activeMarkerEnd + lineBreak;
}
else
{
ptr += textToAdd + lineBreak;
}
}
else
{
ptr +="<a href=\"/manual\">Disable Auto Control</a><br><br>";
}
ptr +="</body>\n";
ptr +="</html>\n";
return ptr;
}
void controlAir()
{
if (innerTemperature == -127 || outerTemperature == -127)
{
errorBlink();
}
else
{
if (airControlManual == false)
{
if (innerTemperature <= tempInnerOpti && outerTemperature >= (innerTemperature+tempDiffToChange)) // innen zu kalt
{
enableAir();
}
else if (innerTemperature >= tempInnerOpti && (outerTemperature+tempDiffToChange) <= innerTemperature) // innen zu heiß
{
enableAir();
}
else
{
disableAir();
}
}
}
}
void enableManual()
{
digitalWrite(manualControlPin, HIGH);
airControlManual = true;
}
void disableManual()
{
digitalWrite(manualControlPin, LOW);
airControlManual = false;
}
void enableAir()
{
Serial.println("Enable Air!");
digitalWrite(airControlPin, HIGH);
airControlState = true;
}
void disableAir()
{
Serial.println("Disable Air!");
digitalWrite(airControlPin, LOW);
airControlState = false;
}
void errorBlink()
{
digitalWrite(morsePin, HIGH);
delay(200);
digitalWrite(morsePin, LOW);
delay(200);
digitalWrite(morsePin, HIGH);
delay(200);
digitalWrite(morsePin, LOW);
delay(200);
digitalWrite(morsePin, HIGH);
delay(200);
digitalWrite(morsePin, LOW);
}
void readTemperatures()
{
innerSensor.requestTemperatures();
innerTemperature = innerSensor.getTempCByIndex(0);
Serial.print("InnerTemp: ");
Serial.print(innerTemperature);
Serial.println("ºC");
outerSensor.requestTemperatures();
outerTemperature = outerSensor.getTempCByIndex(0);
Serial.print("OuterTemp: ");
Serial.print(outerTemperature);
Serial.println("ºC");
}
Hinweis
Dieser Artikel dokumentiert lediglich meinen Aufbau. Für den Nachbau, die Nutzung einzelner Komponenten, die Platinen und den gesamten Inhalt wird die Haftung in jeglicher Form ausgeschlossen.